Biography
Yanlin’s research focuses on modeling driving behaviors across various levels of autonomy (SAE L0 to L4) using synthetic and real-world data. This involves characterizing interactions between human drivers and connected automated vehicles (CAVs) to identify and evaluate changes in driving behavior. The goal is to enhance automated driving models and traffic management strategies, ultimately improving system-level safety and efficiency.
- Artificial Intelligence in Transportation
- Connected and Automated Vehicles
- Behavioral Science in Mixed Autonomy Traffic
- Traffic Flow Theory
Ph.D. in Transportation Engineering & Computational Science and Engineering, Expected 2026
University of Illinois, Urbana-Champaign
M.Sc. in Transportation System Analysis and Planning, 2021
Northwestern University
B.Eng. in Traffic Engineering (Highest Honors), 2020
Tongji University
News
- [ Oct. 2025 ] I presented “Stochastic Shockwave Dynamics in First-Order Traffic Flow” at the 2025 INFORMS Annual Meeting.
- [ Apr. 2025 ] Our paper on the discretionary lane-changing decisions analysis using the Third Generation Simulation (TGSIM) dataset has been published by Transportation Research Record.
- [ Jan. 2025 ] Our paper on the data collection and trajectory extraction of the Third Generation Simulation (TGSIM) dataset has been published by Transportation Research Record.
- [ Jan. 2025 ] Two of our research papers on interaction dynamics of human and highly automated vehicles and traffic jam dynamics have been selected for presentation at the 2025 TRB Annual Meeting.
- [ Sep. 2024 ] Our work on using the TGSIM dataset to study complex traffic flow dynamics won the best poster award at the Next-Generation Transport Systems Conference (NGTS-4).
- [ May 2024 ] I passed my preliminary examination and advanced to candidacy for the Ph.D. degree. My greatest gratitude goes to my wonderful advisor Dr. Alireza Talebpour, and my distinguished committee members Dr. Hani Mahmassani, Dr. Yanfeng Ouyang, and Dr. David Forsyth for the unwavering support!
- [ Feb. 2024 ] I was invited by ITE@UIUC to join a panel on automated driving systems with Dr. David Forsyth and the ILLINI EV Concept team, discussing the future of mobility.
- [ Jan. 2024 ] Four of our reasearch papers foucing on L0 to L4 trajectory data collected with moving helicopters have been selected for presentation at the 2024 TRB Annual Meeting.
- [ Aug. 2023 ] Our paper Characterizing Human–Automated Vehicle Interactions: An Investigation into Car-Following Behavior has been published by Transportation Research Record.
- [ Jul. 2023 ] I presented our work on the Impacts of Automated Vehicles on Mixed-autonomy Traffic Flow at the Traffic Flow Theory and Characteristics Committee (ACP50) Summer Meeting.
- [ Mar. 2023 ] I presented our work on bahavioral modelling of human drivers in mixed traffic flow at the 109th Illinois Transportation and Highway Engineering (T.H.E.) Conference.
- [ Feb. 2023 ] I am honored to have been chosen as the recipient of the Charles E.DeLeuw Scholarship by the CEE Department at UIUC. I extend my deepest gratitude for this recognition!
- [ Jan. 2023 ] I presented our work on human behavioral change in the era of automated driving and participated in a panel on behavioral insights of CAVs in traffic flow, alongside with Dr. Alireza Talebpour, Dr. Konstantinos Mattas and Dr. Di Yang at the 2023 TRB Annual Meeting.
- [ Oct. 2022 ] I presented our work on “Characterizing human-automated vehicle interactions: Safety Implications on Mixed Autonomy Traffic” at the 71st Annual Illinois Transportation Engineering and Safety Conference.
- [ Oct. 2022 ] I presented our work on “Modeling the Impacts of Automated Vehicles on Mixed-autonomy Traffic Flow” at the 2022 INFORMS Annual Meeting.
Projects
Featured Publications
Can the Waymo Open Motion Dataset Support Realistic Behavioral Modeling? A Validation Study with Naturalistic Trajectories
Comprehensive evaluation of the Waymo Open Motion Dataset (WOMD) against naturalistic driving data from Level 4 autonomous vehicle operations in Phoenix, Arizona.
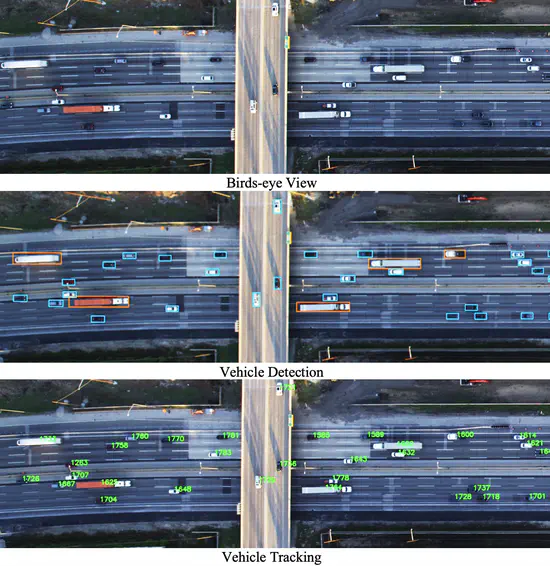
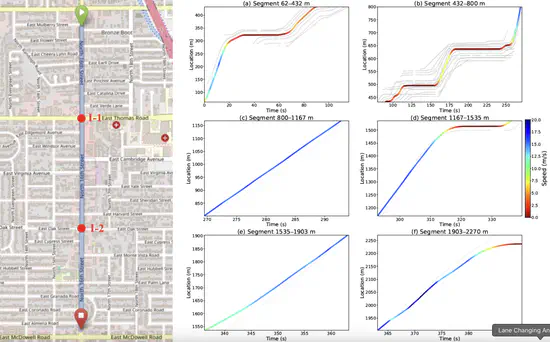
Introduction to the Third Generation Simulation Dataset: Data Collection and Trajectory Extraction
A comprehensive overview of the Third Generation Simulation (TGSIM) dataset, detailing its data collection methodologies, trajectory extraction processes, and the challenges encountered during its development.
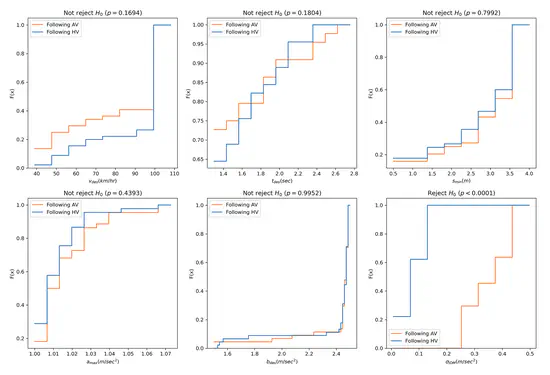
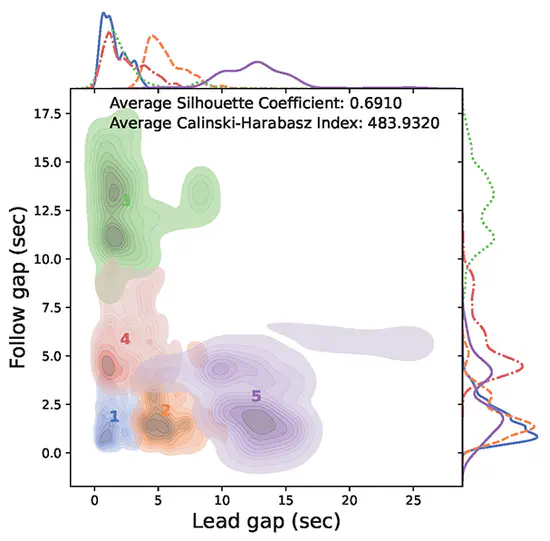
Characterizing Human–Automated Vehicle Interactions: An Investigation into Car-Following Behavior
The presence of automated vehicles can change human driver’s car-following behavior into less uncertainty.
Recent Publications
Contact
- yanlinz4@illinois.edu
- B106 Newmark Civil Engineering Laboratory, 205 North Mathews Ave., Urbana, IL 61801